Usually, the stabilization system tends to maintain the aim even if the vehicle moves on rough terrain, but in any case it is also necessary to maintain the control of the joystick by the operator.
In the operating condition of tracking a target on rough terrain, the joystick lever is subject to accidental movements caused by the shaking produced by the vehicle while on the move. In these conditions, therefore, the operator is obliged to manually compensate the movements induced on the joystick lever in order to maintain target tracking, this last condition being extremely difficult when the target to be followed has a steady angular motion.
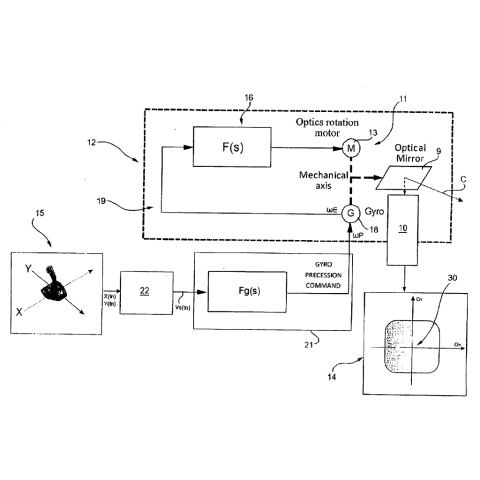
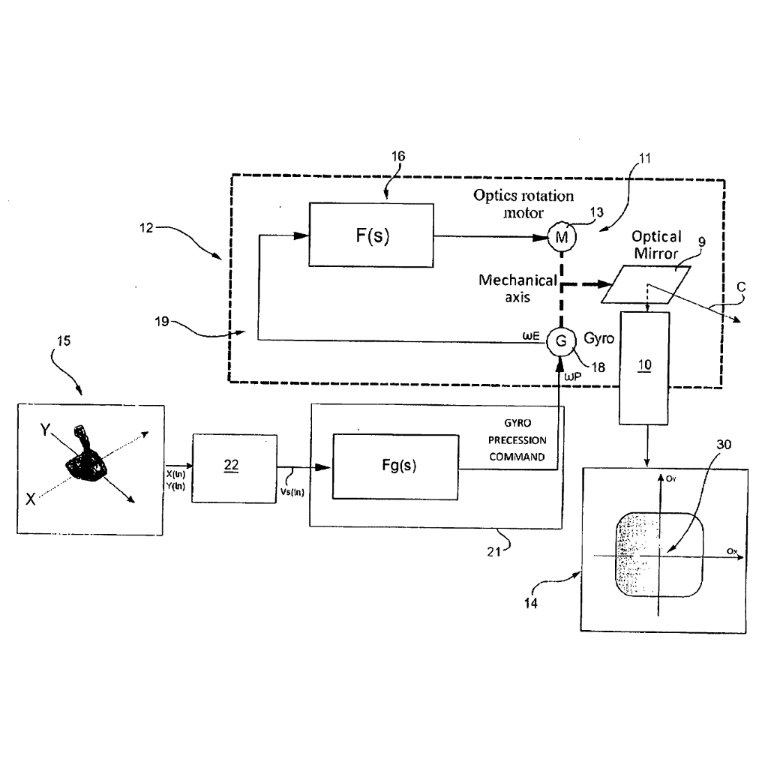
The different servo-controlled systems that carry out the aiming, which are the object of the patented solution, are configured to apply adaptive filters to sudden joystick movements. These filters are designed to adapt the response of the control system to the operating conditions.